
Page 332 - 《环境工程技术学报》2023年第1期
P. 332
· 328 · 环境工程技术学报 第 13 卷
条件均参考了实际场地的先验信息,建立模型的过 准确性。因此通过现场试验,确定了噪声值范围,然
程如下:1)建立一个长方体用来模拟堆体;2)在模拟 后在仿真数据中加入均值 为 0,方差 为 0.0 的高斯
5
堆体底部放 置 1 个与堆体底面积相同的长方体来模 噪声,使得仿真数据更加贴近真实值。
拟渗滤液,渗滤液和堆体存在电阻率差异,并设定堆 1.4 电阻率非线性反演模型
体的下表面 为 HDP 膜,将其电阻率值设定 为 1 个 1.4.1 B 神经网络
P
E
高阻值;3)在堆体上表面铺 设 3 条测线,模拟川形装 B 神经网络是一种根据误差反向传播算法进
P
置进行电势数据采集,另外将川形装置的测 线 2 再 行训练的多层前馈神经网络,由输入层、隐藏层和输
使用温纳方式进行采集,用于作为 与 L 法结果的对 出 层 3 部分组成, 以 3 层 B 神经网络为例,网络结
S
P
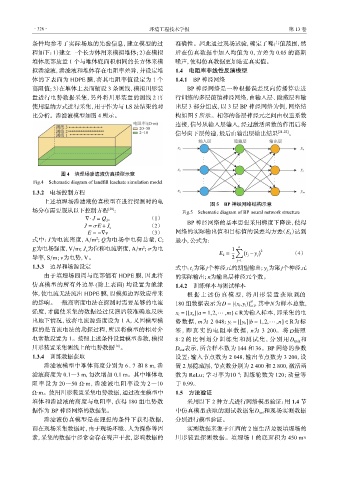
比分析。渗滤液模型如 图 4 所示。 构如 图 5 所示。相邻的各层神经元之间由权重系数
连接,信号从输入层输入,经过激活函数的作用后将
信号向下层传递,最后由输出层输出结果 [21-22] 。
图 4 填埋场渗滤液仿真模型示意
Fig.4 Schematic diagram of landfill leachate simulation model
1.3.2 电场控制方程
上述填埋场渗滤液仿真模型在进行探测时的电 图 5 B 神经网络结构示意
P
[20]
场分布需要服从以下控制方程 : Fig.5 Schematic diagram of BP neural network structure
(1)
∇· J = Q j,v B 神经网络的基本思想采用梯度下降法,使得
(2) P
J = σE + J e
E = −∇v (3) 网络的实际输出值和目标值的误差均方差( E k )达到
式中: J为电流密度, A/m Q为电场中电荷总量, C; 最小,公式为:
;
2
;
;
n
E为电场强度, V/m J e 为位移电流密度, A/m σ为电 1 ∑ ( ) 2
2
E k = t j −y j (4)
导率, S/m v ; 为电势, V。 2
j=1
1.3.3 边界和场源设定 式中: t j 为第 j个神经元的期望输出; 为第 j个神经元
y j
由于填埋场四周与底部铺 有 HDP 膜,因此将 的实际输出; n为输出层神经元个数。
E
仿真模型的所有外边 界 (除上表面 均设置为绝缘 1.4.2 训练样本与测试样本
)
体,使电流无法流 出 HDP 膜,以模拟边界效应带来 根 据 上 述 仿 真 模 型 , 将 川 形 装 置 获 取 到的
E
的影响。一般高密度电法在探测时需要足够的电流 18 组数据表示为 D = {(x i ,y i )} ,其中 N为样本总数,
N
0
i=1
强度,才能使采集的数据经过反演后较准确地反映 x i = {[x a ]|a = 1,2,··· ,m} ∈ R为输入样本,即采集的电
出地下情况,故将电流源强度设 为 1 A,又因模型模 势数据, m为 2 048; y i = y b |b = 1,2,··· ,n ∈ R为标
{[ ]
}
拟的是直流电法的勘探过程,所以将模型的相对介 签 , 即 真 实 的 电 阻 率 数 据 , n为 3 200。 将 D按照
电常数设置 为 1。按照上述条件设置模型参数,模拟 8∶ 的比例划分训练集和测试集,分别用 D train 和
2
川形装置采集测线上的电势数据 。 D test 表示,所含样本数为 14 和 36。B 网络的参数
[16]
P
4
1.3.4 训练数据获取 设置:输入节点数 为 2 048,输出节点数 为 3 200,设
渗滤液模型中堆体高度分别 为 6、 和 8 m,渗 置 2 层隐藏层,节点数分别 为 2 40 和 2 800,激活函
0
7
滤液高度 为 0.1~3 m,每次增 加 0.1 m。其中堆体电 数 为 ReLu;学习率为 10 ;训练轮数为 120;动量等
−4
阻率设为 20~50 Ω·m,渗滤液电阻率设为 2~10 于 0.99。
Ω·m。使用川形装置采集电势数据,通过改变模型中 1.5 方法验证
堆体和渗滤液的高度与电阻率,获 得 18 组电势数 采用以 下 2 种方式进行网络模型验证: 用 1. 节
0
4
据作 为 B 神经网络的数据集。 中仿真模型获取的测试数据集 D test 和现场实测数据
P
渗滤液仿真模型是在理想的条件下获得数据, 分别进行模型验证。
而在现场采集数据时,由于现场环境、人为操作等因 实测数据来源于江西 的 2 座生活垃圾填埋场的
素,采集的数据中经常会存在噪声干扰,影响数据的 川形装置探测数据。填埋 场 1 的底面积 为 450 m×