
Page 331 - 《环境工程技术学报》2023年第1期
P. 331
第 1 期 能昌信等: 受 HDP 膜影响下的垃圾填埋场渗滤液水位探测方法研究 · 327 ·
E
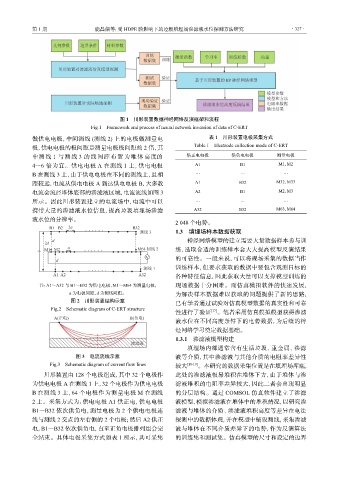
图 1 川形装置数据神经网络反演框架和流程
Fig.1 Framework and process of neural network inversion of data of C-ERT
做供电电极,中间测 线 (测 线 2 上的电极做测量电 表 1 川形装置电极采集方式
)
极,供电电极的极间距是测量电极极间距 的 2 倍,其 Table 1 Electrode collection mode of C-ERT
中测线 1 与测线 3 的线间距布置为堆体高度的 供正电电极 供负电电极 测量电极
4~ 倍为宜。供电电 极 A 在测 线 1 上,供电电极 A1 B1 M1,M2
6
B 在测 线 3 上,由于供电电极在不同的测线上,且相 … … …
距较远,电流从供电电 极 A 到达供电电 极 B,大多数 A1 B32 M32,M33
电流会流经堆体底部的渗滤液区域,电流流线如 图 3 A2 B1 M2,M3
所示。因此川形装置建立的电流场中,电流中可以 … … …
携带大量的渗滤液水位信息,提高垃圾填埋场渗滤 A32 B32 M63,M64
液水位的分辨率。
8
2 04 个电势。
1.3 填埋场样本数据获取
神经网络模型的建立需要大量数据样本参与训
练,选取合适的训练样本会大大提高模型反演结果
的可靠性。一般来说,可以将现场采集的数据当作
训练样本,但要求获取的数据中要包含观测目标的
各种特征信息,因此获取大量可以支撑模型训练的
注:A1~A3 与 2 B1~B3 为供电电极,M1~M6 为测量电极; 现场数据十分困难。而仿真模拟软件的快速发展,
2
4
a 为电极间距, 为测线间距。 为解决样本数据难以获取的问题提供了新的思路,
d
图 2 川形装置结构示意 已有学者通过试验对仿真模型数据的真实性和可靠
Fig.2 Schematic diagram of C-ERT structure [17]
性进行了验证 。笔者采用仿真模拟模型获得渗滤
液水位在不同高度条件下的电势数据,为后续的神
经网络学习奠定数据基础。
1.3.1 渗滤液模型构建
填埋场内部通常含有生活垃圾、重金属、渗滤
图 3 电流流线示意 液等介质,其中渗滤液与其他介质的电阻率差异性
Fig.3 Schematic diagram of current flow lines 较大 [18-19] 。本研究的数据采集位置是在填埋场库底,
川形装置 由 12 个电极组成,其 中 3 个电极作 此处的渗滤液极易堆积在堆体下方,由于堆体与渗
8
2
为供电电 极 A 在测 线 1 上,3 个电极作为供电电极 滤液堆积的电阻率差异较大,因此二者会出现明显
2
B 在测 线 3 上,6 个电极作为测量电 极 M 在测线 的分层结构。通 过 COMSO 仿真软件建立了渗滤
L
4
2 上。采集方式为:供电电 极 A 供正电,供电电极 液模型,模拟渗滤液在堆体中的堆积情况,以研究渗
1
B1~B3 依次供负电,测量电极 为 2 个供电电极连 滤液与堆体的介质、渗滤液堆积高度等差异在电法
2
线与测 线 2 交点的左右侧 的 2 个电极;然 后 A 供正 探测中的数据体现,并在模型中铺设测线,采集渗滤
2
电,B1~B3 依次供负电,直至正负电极排列组合完 液与堆体在不同介质差异下的电势,作为反演算法
2
全结束。具体电极采集方式如 表 1 所示,共可采集 的训练集和测试集。仿真模型的尺寸和设定的边界